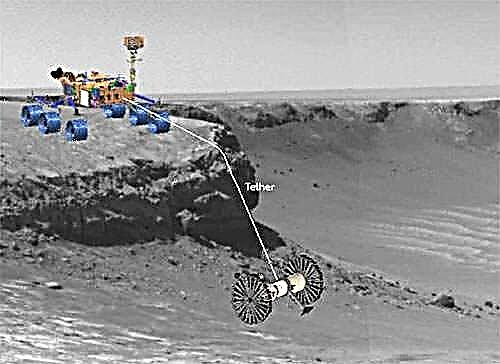
Si ha mirado las imágenes de alta resolución de HiRISE del Mars Reconnaissance Orbiter, o ha tenido la oportunidad de explorar el nuevo Google Mars, sabe que Marte está lleno de cráteres, montañas, barrancos y todo tipo de terrenos interesantes y peligrosos. . Áreas como estas con depósitos en capas, sedimentos, fracturas y fallas son el tipo de lugares para buscar las fuentes de metano que se producen en Marte. Pero es demasiado arriesgado enviar nuestro estilo actual de rovers, incluido el Mars Science Laboratory (MSL) 2011, a un terreno traicionero. Pero los ingenieros de JPL, junto con los estudiantes del Instituto de Tecnología de California, han diseñado y probado un robot versátil y de baja masa que podría agregarse a rovers más grandes como MSL que puede hacer rappel en acantilados, viajar ágilmente sobre terrenos empinados y rocosos, y explorar cráteres profundos
Este prototipo de rover, llamado Axel, podría ayudar a futuras naves espaciales robóticas a explorar e investigar mejor mundos extranjeros como Marte. En la Tierra, Axel podría ayudar en las operaciones de búsqueda y rescate.
"Axel extiende nuestra capacidad de explorar terrenos que no hemos podido explorar en el pasado, como cráteres profundos con promontorios inclinados verticalmente", dijo el investigador principal de Axel, Issa A.D. Nesnas, de la sección de robótica y movilidad de JPL. “Además, debido a que Axel tiene una masa relativamente baja, una misión puede llevar varios rovers Axel. Eso nos daría la oportunidad de ser más agresivos con el terreno que exploraríamos, al tiempo que mantendría manejable el riesgo general ”.
Nesnas dijo que Axel es como un yo-yo: está en una correa atada a un rover más grande y puede subir y bajar por los cráteres, cañones y barrancos, explorando regiones que no son seguras para otros rovers.

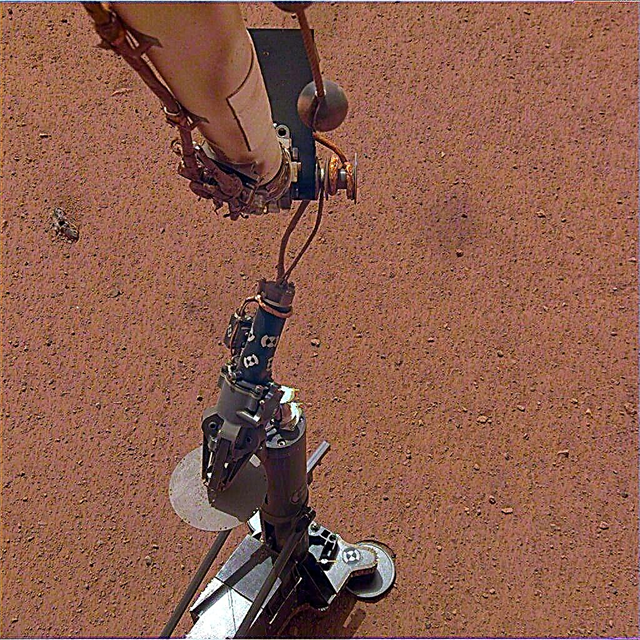
El diseño simple y elegante de Axel, que puede funcionar tanto boca abajo como derecho, usa solo tres motores: uno para controlar cada una de sus dos ruedas y un tercero para controlar una palanca. La palanca contiene una cuchara para recolectar material lunar o planetario para que los científicos estudien, y también ajusta las dos cámaras estéreo del robot, que pueden inclinarse 360 grados.

El cuerpo cilíndrico de Axel tiene capacidades informáticas y de comunicaciones inalámbricas y un sensor inercial para operar de forma autónoma. También luce una correa que Axel puede desenrollar para descender desde un módulo de aterrizaje, rover o punto de anclaje más grande. El rover puede usar diferentes tipos de ruedas, desde grandes ruedas plegables hasta hinchables, que ayudan al rover a tolerar un aterrizaje duro y manejar terrenos rocosos.
Axel ha estado en desarrollo desde 1999, y los estudiantes de Caltech, Purdue University y Arkansas Tech University han colaborado con JPL a lo largo de los años para desarrollar este versátil rover.
Para obtener más información sobre Axel, consulte la página Axel de JPL y el sitio web Axel de Caltech.